

The Truefin® scuba/snorkel open heel fin has been under continuous development for over seven years and has been extensively tested for propulsion, efficiency, maneuverability, stability, comfort, and durability.
Scuba fins and snorkel fins are a category that has not changed much over the last six centuries, and has history going back as far as Leonardo da Vinci and Benjamin Franklin. More recent designs include vented, split, scooped, or hinged blades. Until the advent of Truefin® the user has had to choose between a flexible fin or a stiff fin according to the task to be performed. Truefin®'s innovative approach involves the introduction of artificial spines which enforce a distributed smooth curve flex of the blade during an efficient and streamlined angle of attack (no sharp 'hinged' bend) which offers an improved user experience for this critical diving accessory. Truefin® has the comfort and easy kicking of a highly flexible fin, while also having the high thrust of the stiffest technical fin.
Swim fins are available in both open heel designs as well as closed heel designs. Open heel fins are generally more popular than closed 'full foot' fins due to the preference of many users to wear booties which are warmer in cold water, and booties are more comfortable on hot dive decks and also safer for shore diving while walking on rough shore terrain prior to entering or exiting the water during snorkel and scuba diving. Also, open foot or open heel fins may be adjusted to exactly fit the user's feet. Closed heel fins are usually less expensive and generally worn barefoot or with socks and have high comfort if properly fitted, as well as having less drag resistance than open heel fins while kicking or moving through water.
Efficiency of swim fins is a function of the average forward velocity in water and the power required to achieve that speed. The diver must overcome drag while swimming, where active drag (drag from a diver swimming through water) is generally greater than passive drag (drag from a diver being towed through water). In order to minimize active drag while flutter kicking for example, short kicks are advised over long kicks in order to minimize the projected area profile of the diver. However, to further confuse the matter, greater energy may be required to perform short kicks at high frequency versus long kicks at a lower frequency because moving a small mass of water rapidly is less efficient than moving a large mass of water slowly; so efficiency comparisons between long stroke kicking versus short stroke kicking are not apparent.
During high frequency flutter kicking Truefin® performs exceptionally well and high swim velocities are achieved. Whereas during rapid kicking traditional flexible fin blades collapse (or 'go flat' as it is known in the industry), and for this reason very stiff traditional fins have been chosen in the past in order to minimize the likelihood of the stiff fin blade collapsing during moderate to high kicking frequencies. Furthermore, a disadvantage with a traditional stiff fin is that muscle fatigue and relatively high oxygen consumption for the amount of speed achieved occurs during low kicking frequencies with a stiff fin, and as a result a traditional stiff fin is inefficient and uncomfortable to use when kicking at slow to moderate speeds due to abnormally high strain at the user's ankle for the low amount of thrust generated. Furthermore, at low kicking frequencies, with a traditional stiff fin much energy is lost with water spilling over the sides which increases resistance and produces no useful work. If a traditional fin is considered stiff enough that it can not be 'over kicked', then at low kicking frequencies the fin will perform unsatisfactorily and may cause muscle cramps.
The fin blade flex characteristics of Truefin® equipped with Blue spines is twenty degrees (20°) in the 'toe up' direction, and sixty degree (60°) in the 'toe down' static flex direction (45° 'toe down' effective dynamic flex) and is determined by the articulation limit between each of the collision sites between a series of artificial vertebrae. In the Blue spines the articulation limit between successive vertebrae is four degrees (4°) in the toe up direction and twelve degrees (12°) in the toe down direction.

The flexible blade of Truefin® in combination with the artificial spines results in a new type of swim fin that performs very well during scuba and snorkel activities due to overall comfort and efficiency. Truefin® also has applications when spearfishing because Truefin® is highly maneuverable, and the artificial spines prevent the blade from collapsing when shorediving and during fast acceleration when in surf, or while in rough seas with big swells and current around reefs. However, freediving fins (with blade lengths between 31-40 inches for example) are more efficient then Truefin® and scuba fins in general, so spearfishing is typically performed with long, flexible freediving fins, and most often in deep open water where the diver is not concerned about critical maneuvers, and it is unlikely that collisions will occur between the fin blades and underwater obstructions.

Truefin® has chosen to incorporate a non-vented and highly streamlined paddle style blade with an upper planar surface extending over the foot pocket in order to facilitate laminar flow.

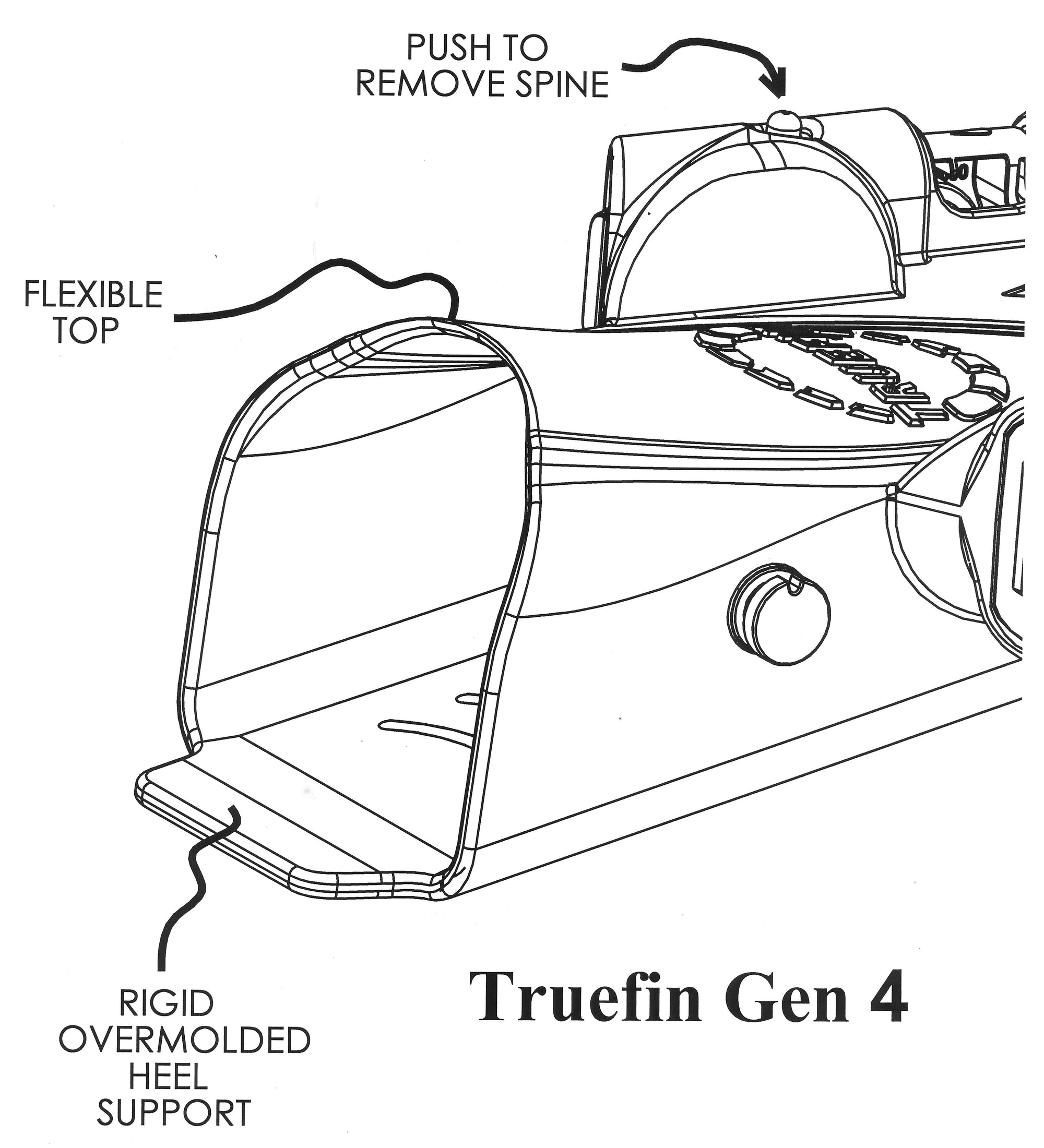
The bottom sole or platform of Truefin® is provided with a low profile non-slip surface having relatively complex topology. The extended overmolded bottom region rigidly supports the user's heel, and the top is tapered thin for comfort.